3D-Roboterführung
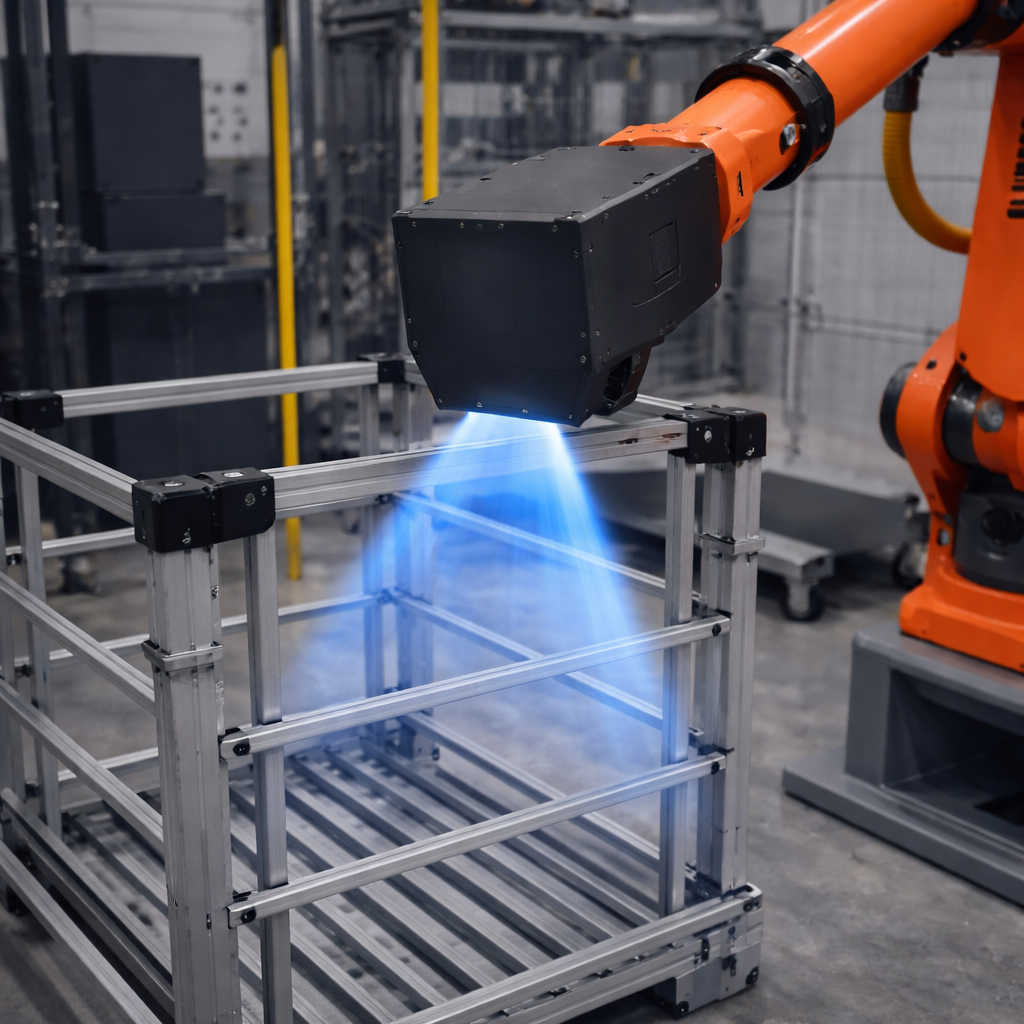
Die 3D-Roboterführung ermöglicht eine präzise und robuste Erkennung von Bauteilposition und -orientierung für automatisierte Handhabungsprozesse. Ein kompakter 3D-Stereosensor erfasst zuverlässig Lage, Höhe und Verkippung von Objekten und übergibt dem Roboter exakte Koordinaten für sichere und reproduzierbare Greifbewegungen.
Damit lassen sich auch Bauteile mit Positionsabweichungen, Fertigungstoleranzen oder Schiefstellungen zuverlässig erkennen und automatisiert handhaben. Neben der reinen Greifpunktbestimmung können optional auch Funktionsflächen oder Bauteilzustände geprüft werden, beispielsweise zur Qualitätskontrolle oder zur Sicherstellung der korrekten Bauteillage.
Das System ist werkseitig vorkalibriert, markenunabhängig integrierbar und besonders einfach in bestehende Automatisierungslösungen implementierbar. So können Unternehmen bis lang manuelle Handhabungsprozesse effizient automatisieren, die Prozesssicherheit erhöhen und gleichzeitig den Integrationsaufwand reduzieren.
Die Lösung eignet sich für unterschiedlichste Anwendungen wie Depalettieren, Bin-Picking, Teilehandling oder automatisierte Montageprozesse. Dank der flexiblen 3D-Technologieplattform profitieren Anwender von einer skalierbaren und zukunftssicheren Basis für moderne, automatisierte Produktionsumgebungen.
Kundenzitat
„Mit der 3D-Robotorführung können wir auch bei Lageabweichungen und Verkippungen zuverlässig greifen. Das System ist kompakt, schnell integriert und flexibel für unterschiedliche Anwendungen einsetzbar.“
3D-Lage- & Orientierungsbestimmung
Verkippungserkennung
Werkseitig vorkalibriert
Optionale Zustandsprüfung
Robotergeführte Greifpunktbestimmung
Kompaktes Sensorsystem
Einfache TCP-Kalibrierung
Markenunabhängige Integration